Mobile Robot-Based 3D Shape & Deformation Measurement Automation System
RoboScan250 integrates an autonomous mobile robot (AMR), a 6-axis articulated robot, and the ZEISS ARAMIS digital measurement sensor (Germany) into a single platform for automated 3D shape and deformation measurement. The robot autonomously travels to the measurement target, the articulated robot positions the measurement pose, and high-precision 3D displacement, motion, and strain are measured automatically. Measurement sequences are validated in advance within a digital-twin virtual environment, while web-based integrated monitoring and control manages the status of robots and measurement devices in real time.
Key Features
High-Precision 3D Shape Measurement
- ZEISS ARAMIS measurement system (Germany)
- Resolution 4096 x 3000 pixel
- Frame Rate 25 Hz ~ 100 Hz
- Measurement area 20 x 15 ~ 1800 x 1500 mm²
- 3D displacement and motion measurement
- Strain measurement
- LED Illumination
Measurement Path Generation & Sequence Management
- Robot measurement position & pose adjustment
- Direct teaching of the cobot
- Teaching pendant
- Virtual environment
- Measurement sequence creation & management
- Task creation for robot movement and measurement
- Detailed settings per task
- Add, move, and delete tasks
- Sequence management such as save and load
Digital Twin & Virtual Environment Element Management
- Sequence validation in the virtual environment
- Verify robot position and pose
- Verify measurement area
- Virtual environment element management
- Import target CAD data and register on screen
- Robot data management
Real-Time Monitoring & Integrated Control
- Web-based integrated equipment status monitoring
- Real-time monitoring of robot and measurement device status
- Sequence execution status monitoring
- Management of movement, pose, and measurement tasks
- Task list and execution status display
- Root-cause analysis via log messages
- Web-based robot control
- AMR position & path planning → autonomous driving
System Configuration
Mobile Robot (AMR)
- Dimension: 870 x 600 x 265 mm
- Speed: 1.5 m/s (Max)
- Weight: 130 kg
- Payload: 250 kg
- Accuracy: Global ±30 mm / Docking ±5 mm
- Battery: 48V output x 1, 24V output x 1 (8 hr full-load runtime, 90 min charging)
- Charging station: Input AC 90~264 V, max power consumption 2200 W
- Manual charging unit included
6-Axis Articulated Robot
One of the following two 6-axis cobot models can be selected according to customer requirements.
Type A
- Axis: 6-axis / Payload: 9 kg / Reach: 1,200 mm / Repeatability: ±0.05 mm
- DC controller included: no DC converter required
- PDB board: circuit protection, power input 24~48V, up to 80A
- Accessories: universal adapter, AMR mounting frame and cover
Type B
- Axis: 6-axis / Payload: 7 kg / Reach: 1,210 mm / Repeatability: ±0.1 mm
- DC-AC inverter: AMR DC power → robot AC power conversion, input 48V DC / output 220V AC, rated 3kW
- PDB board: circuit protection, power input 24~48V, up to 80A
- Accessories: universal adapter, AMR mounting frame and cover
Digital Measurement Sensor (ZEISS ARAMIS)
- Manufacturer: ZEISS
- Camera resolution: 4096 x 3000 pixel (25 Hz, full) ~ up to 100 Hz with binning
- Frame Rate: 25 Hz ~ 100 Hz
- Strain measurement range: 0.02% ~ over 100%
- Measurement area: 20 x 15 ~ 1800 x 1500 mm² / Weight: 1.0 kg / Illumination: LED
- Processing computer: Intel Core i9-13950HX, RAM 64GB DDR5, NVIDIA RTX 3500 Ada 12GB, 17” display, 1TB SSD, Windows 11
- USB 3m cable, one single macro lens included
ARAMIS Use Case — Full-field strain measurement of a tensile specimen
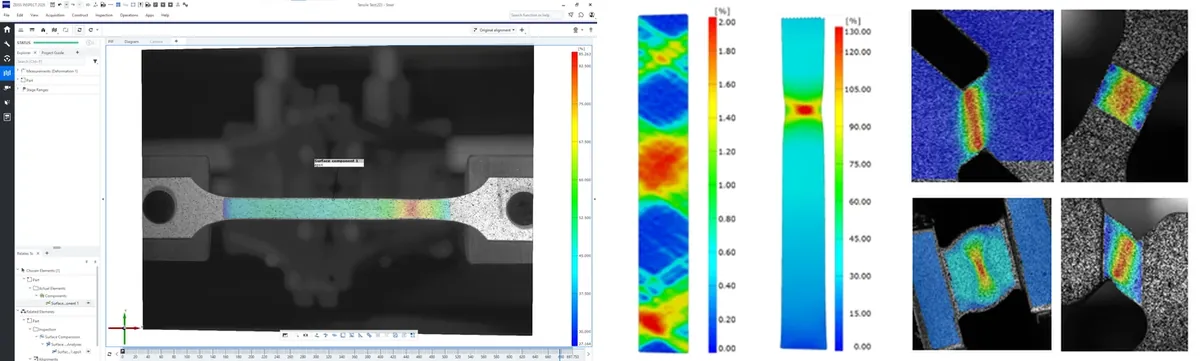
ARAMIS computes surface displacement and strain on a per-pixel basis and visualizes strain-concentration areas as color maps. Under static and dynamic loading tests, it quantitatively analyzes cracking, necking, and localized deformation behavior.
Integrated Operation Computer
- CPU: Ultra7-265 (20 Core / 20 Threads) / Memory: 32GB DDR5 / Storage: 1TB SSD
- Power: 80+ 700W ATX
- OS: Linux (the ARAMIS processing computer runs Windows)
- Monitor: 27”, 1920 x 1080, HDMI / Keyboard·Mouse included
Measurement Product Lineup Expansion
Beyond the standard ZEISS ARAMIS configuration, the RoboScan250’s digital measurement sensor can be expanded by selecting between the ARAMIS 3D series and the ATOS 5 series according to the measurement purpose and target. ARAMIS 3D is applied for dynamic deformation and motion measurement, while ATOS 5 is applied for precise 3D shape scanning — configuring the measurement lineup to match field requirements.
ARAMIS 3D Series — 3D Deformation & Dynamic Behavior Measurement
An optical measurement system that performs full-field measurement of dynamic behavior such as displacement, strain, and vibration of a target. The model can be selected according to measurement volume and frame rate.
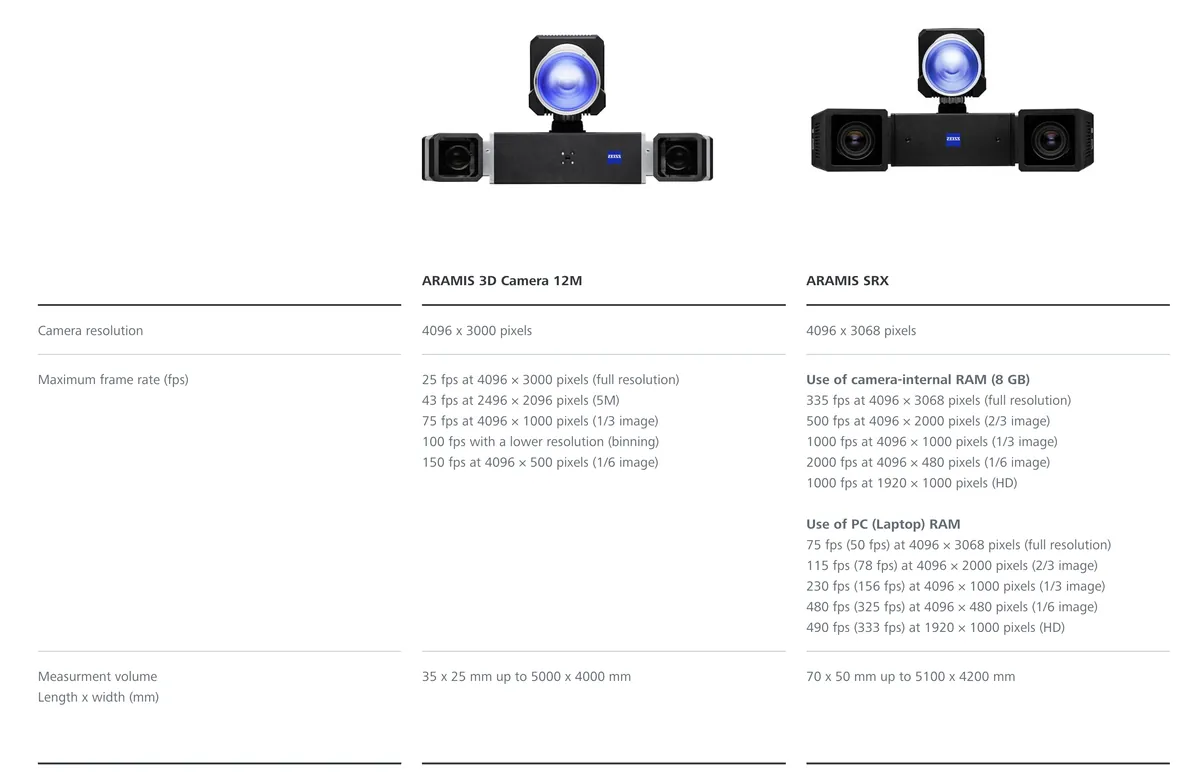
- ARAMIS 3D Camera 12M: 4096 x 3000 pixel, up to 150 fps, measurement volume 35 x 25 mm ~ 5000 x 4000 mm
- ARAMIS SRX: 4096 x 3068 pixel, high-speed measurement up to ~2000 fps using camera-internal RAM (8GB), measurement volume 70 x 50 mm ~ 5100 x 4200 mm
ATOS 5 Series — High-Precision 3D Shape Scanning
A structured-light system that scans the surface shape of a target into high-density 3D data. The model can be selected according to measurement volume and detail requirements.
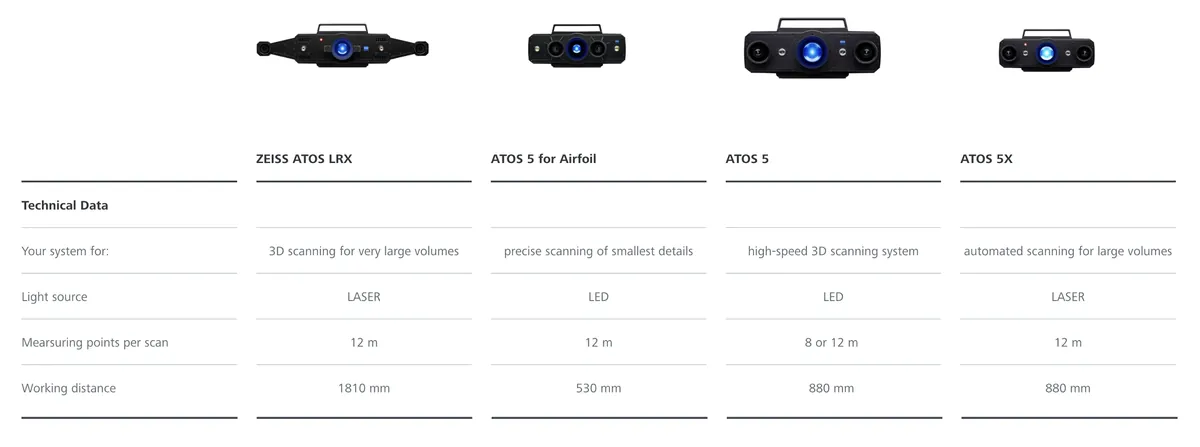
- ZEISS ATOS LRX: 3D scanning of very large volumes (LASER), working distance 1810 mm
- ATOS 5 for Airfoil: precise scanning of fine details (LED), working distance 530 mm
- ATOS 5: high-speed 3D scanning system (LED), working distance 880 mm
- ATOS 5X: automated scanning of large volumes (LASER), working distance 880 mm
Integrated Operation Software
Robot Control
- Mobile robot control
- Map generation
- Path generation
- Autonomous movement
- Articulated robot control
- Motion & pose control (per-axis / end point)
- Teaching control (pendant-based / direct teaching)
Integrated Control & Measurement
- Web-based real-time monitoring & display
- Robot position & pose
- Equipment & sequence status
- Task & sequence control
- Create / save / load
- Start / stop / cancel
- Parameter settings
- Add / move / delete
- Measurement
- 3D displacement, motion, and strain
- Full-field surface analysis and point-based dynamic analysis
- ZEISS CORRELATE / Inspect integration
- Measurement data acquisition & project management
- External measurement signal synchronization
Virtual Environment
- Virtual environment setup
- Robot configuration
- Import & load target CAD (glTF)
- Display robot & target
- Measurement device & area setup
- Measurement device configuration
- Frustum area configuration
- Measurement area display
- Virtual simulation
- Set & move robot position
- Change pose (per-axis / IK / Gizmo)
- Zoom in/out & pan the view
- Sequence validation
- Add movement, pose, and measurement tasks
- Simulate and validate the task sequence
RoboScan250 in One Line
The robot moves and measures on its own — fully automated 3D shape & deformation measurement.
RoboScan250 integrates an autonomous mobile robot, a 6-axis articulated robot, and the ZEISS ARAMIS digital measurement sensor to automate the entire process of movement → pose control → high-precision 3D measurement. It validates measurement sequences in advance within a digital-twin virtual environment and operates robots and measurement devices in real time through web-based integrated control, ensuring measurement accuracy and repeatability.